создайте профиль
Беспилотник научили уворачиваться от препятствий на скорости 50 км/ч

Команда инженеров создала систему курсовой автокоррекции, которая помогает превратить дрон в по-настоящему изворотливую «пташку»




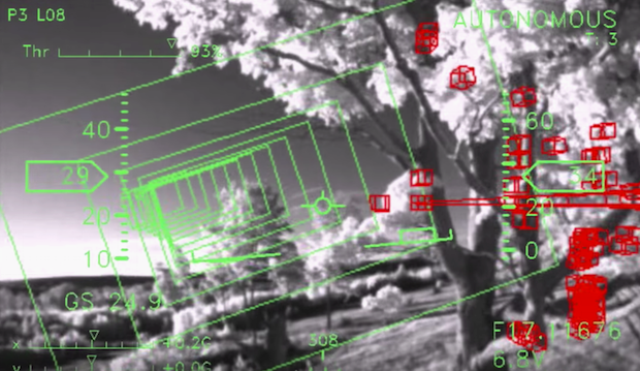
Студенты Массачусетского технологического университета (Massachusetts Institute of Technology) под руководством доктора Эндрю Барри (Andrew Barry) создали автономный дрон небольших размеров, который способен самостоятельно уходить от столкновения с препятствиями, возникающими на его пути. Например, как следует из видео, он довольно успешно избегает столкновения с деревьями.
Кто его создал?

Кампус Лаборатории компьютерных наук и искусственного интеллекта.
Разработка этой беспилотной системы велась в рамках проекта «Высокоскоростная автономная навигация в условиях постоянно изменяющейся среды» (High-Speed Navigation in Cluttered Environments). Работы проводятся на базе Лаборатории компьютерных наук и искусственного интеллекта при МТУ (MIT Computer Science and Artificial Intelligence Lab).
Как это работает?
Команда, состоящая из инженеров и программистов создала систему курсовой автокоррекции, программный алгоритм которой, помогает превратить компактный дрон в по-настоящему изворотливую «пташку».
Более того, это ПО позволяет беспилотнику успешно огибать препятствия даже не имея привязки к актуальной карте местности. Словом, он летит без точных данных о том, что это за место и какой характер его рельефа, а также того, где именно он находится относительно удалённого препятствия. Это свойство делает его абсолютно автономным.
Следовательно, отпадает необходимость закладывать в самолёт перед пуском программу полёта, которая содержит эталонную цифровую карту рельефа местности по маршруту полёта (в процессе полёта бортовая система управления обеспечивает сравнение этой карты с реальными показаниями с датчиков оптико-электронного распознавания и выдачу при необходимости соответствующих команд на корректировку курса).
По словам разработчиков, беспилотнику, чтобы осуществлять безопасный полёт вовсе не нужно сканировать абсолютно всё пространство вокруг себя: всё, на чём ему нужно «сосредоточится» - это относительно небольшая область в пространстве в глубину до 10 м.
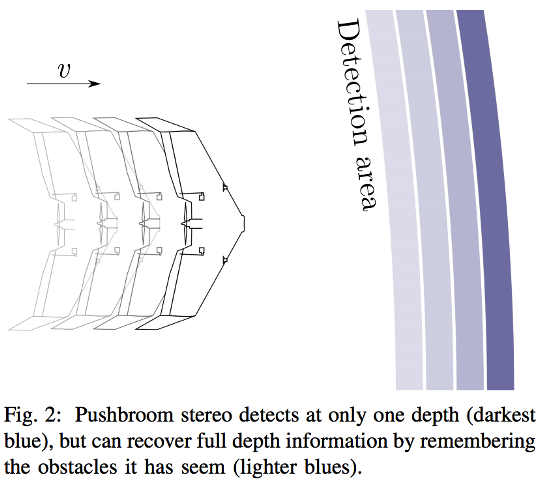
С помощью камер, дрон получает представление о том, что его ждёт впереди. Обработка каждого кадра (пикселей, из которых он состоит) занимает около секунды. Затем кадр сохраняется в памяти аппарата, и следующие изображение, получаемое спустя 8,3 мс, накладывается на предыдущее. Благодаря чему, дрон создаёт подробную 3D-карту того, что непосредственно лежит у него по курсу, и «принимает меры» на основе этой карты.
Дрон «запоминает» полученный кадр (пиксели) на 1-2 с, так что не подумайте, что это цифровое картографирование местности (хотя это, конечно, возможно). В базе данных микрокомпьютера находятся сотни возможных вариантов «парирования критической ситуации в воздухе» в зависимости от формы, размеров и типа препятствия, которое «пташка» может встретить на своём пути.
Из-за небольшой глубины сканирования по курсу, аппарат не имеет достаточно времени, чтобы предпринять эффективный маневр уклонения, если, скажем, он приближается к широкому зданию. Однако, что касается деревьев и других «дискретных структур» (телефонные столбы, дымоходы, трубопроводы), кажется, он может вполне успешно избегать столкновения с ними.
Как отмечают разработчики, горизонт обнаружения в первую очередь зависит от вычислительной мощности бортового компьютера, так что, если удастся расширить его возможности, то аппарат сможет «смотреть» дальше, заблаговременно планируя необходимые манёвры, а значит, огибать и более широкие объекты - здания.
Из чего состоит система?
Прежде всего, стоит отметить, что поиск решения проблемы обработки изображения в режиме реального времени с использованием аппаратных средств настолько компактных и эффективных, чтобы их можно было использовать в сверхмалых БПЛА всегда оставался сложной задачей и, как следует из демонстрационного видео, вполне решаемой.
Аппаратная часть системы предполагает наличие двух высокоскоростных цифровых камер с достаточной разрешающей способностью (120 кадров/с), которые монтируются на крыльях дрона на расстоянии 34 см друг от друга. Камеры разнесены в пространстве, чтобы обеспечивать получение стереокартинки траектории полёта для последующего её анализа системой управления.
Доктор Барри считает, что их система значительно быстрее и эффективнее, чем все существующие ныне аналоги. Более того, он верит, что технология, разрабатываемая командой инженеров под его руководством, позволит отказаться от применения традиционного решения в сфере автономных беспилотных комплексов - громоздкой лазерной системы LIDAR (световое обнаружение и определение дальности). Дело в том, что её габариты делают эту «лялю» непригодной для использования в малых и сверхмалых БПЛА.
Сердцем системы являются два микропроцессора, аналогичные тем, что используются в современных смартфонах. Они обрабатывают весь массив данных, получаемый с камер, рассчитывая безопасную траекторию полёта.
Вместо вывода

Таким образом, дрон стоимостью $1,700 остаётся невредимым благодаря системе, просчитывающей его маршрут на десять метров вперёд. Отмечу, что другие разработчики и ранее показывали беспилотные летательные аппараты, способные избегать столкновений с препятствиями, но все предшествующие образцы такой авиатехники делали это на значительно меньшей скорости.
Примечание автора

RQ-4 «Global Hawk».
Думаю, что в будущем по мере развития технологий, глубина распознавания может быть увеличена. Вероятно, она также будет прямо зависеть от показателей допустимых предельных режимов полёта для каждой модели летательного аппарата в отдельности, ведь всё зависит от аэродинамических свойств самолёта: миниатюрные дроны - более маневренные, и им требуется меньше времени, чтобы отвернуть с курса, а более габаритные - неповоротливы, что требуют «упреждающего маневра» при изменении маршрута полёта. Значит, для «малышей» глубина сканирования может быть меньше, чем для «великанов».
Более того, у каждого самолёта есть свой предел прочности, который называется «Диапазон режимов полёта». Дело в том, что каждый самолёт имеет диапазон режимов полёта, ограничивающий его безопасную эксплуатацию в отношении таких параметров, как минимальная и максимальная скорость полёта и эксплуатационная прочность. Это особенно актуально для летательных аппаратов традиционной аэродинамической схемы (например, российский IAI «Searcher» II «Форпост», американские MQ-9 «Reaper», MQ-1 «Predator», RQ-4 «Global Hawk»).
Другими словами, система может и успеет помочь избежать столкновения с препятствием, но самолёт развалится в воздухе из-за критических нагрузок на структурные элементы его конструкции, которые возникли в результате манёвра. Из этого следует, что показатель пространственного сканирования, вероятно, следует настраивать, учитывая все описанные выше аспекты.

Российский БПЛА «Форпост» (IAI «Searcher» Mk II).



Российский БПЛА «Форпост» (IAI «Searcher» Mk II).